pages
Rust開発環境構築 & 開発方法
rp2350の開発環境構築(26/2/3)
- Cortex-M33の toolchain をインストール
rustup target add thumbv8m.main-none-eabihf
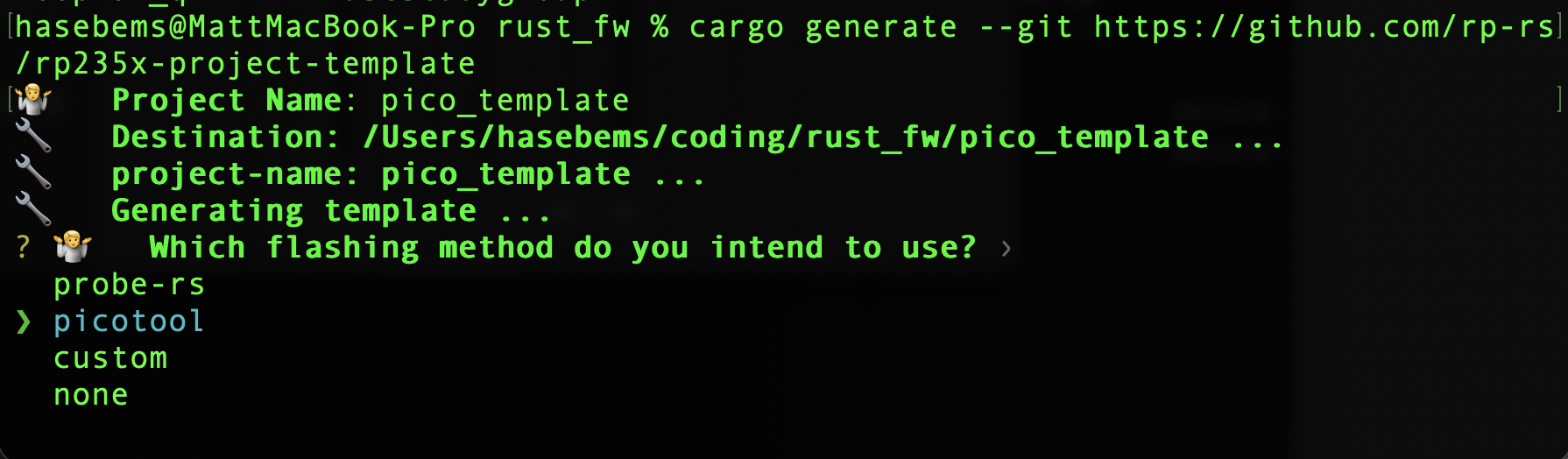
- まず、プロジェクトフォルダを作りたい場所で、以下の template を指定
cargo generate –git https://github.com/rp-rs/rp235x-project-template
- プロジェクト名を指定
- 書き込みツールを選択
picotool
picoの環境構築
- Cortex-M0のtoolchainをインストール
rustup target install thumbv6m-none-eabi
- 関連ツールのcargoへのバイナリクレートのインストール
cargo install cargo-generate flip-link elf2uf2-rs
- flip-linkは、組込みプログラム実行時のスタックオーバーフローを防止するため、リンク時にメモリ配置を変更するツール
- elf2uf2-rsは、ビルドしたプログラムをUF2というPicoに書き込める形式に変換するツール
cargo install –list
- インストールしたバイナリクレートを一覧する
- 以下のコマンドで picotool をインストールする
brew install picotool
Templeteから環境構築
cargo-generate というアプリを使用すれば、以下の手順で自動的に環境作成できる。 以下では、デバッグ用Probeは用いず、直接実行ファイルを書き込む方法を説明する。
- pico開発用Templeteがあるので、そこから新規作成 https://github.com/rp-rs/rp2040-project-template
上記を利用して、開発フォルダを作りたい場所で以下をタイプ(バックスラッシュの後 return して改行)
cargo generate
–git https://github.com/rp-rs/rp2040-project-template
–branch main
–name xxxxxxxxで、環境が一発で作成できる(名前に _ を使うと怒られて、 - に変えられる)
-
上で picotool を選ぶ
- Cargo.toml を修正 name をプロジェクトの名前に
テンプレートへの機能追加の方法
- https://github.com/rp-rs/rp-hal/tree/main/rp2040-hal/examples これらのプログラムを参考にしてペリフェラル(I2C, UART, SPIなど)を使用するプログラムを作成する。
書き込み方法
- ラズパイpicoのスイッチを押しながら、USBケーブルをPCのUSBに挿す
- RPI-RP2 というドライブがPCに現れる
- 以下の普通のコマンドで書き込みが始まる
cargo run